



















일단 작동 자체는 된다
그런데

이미지 연결성이 너무 안 좋다

인식되는 꼬라지 보아하니 양 렌즈의 중앙부분만 인식하는듯싶어서
간격을 더 촘촘히 하면 해결되려나 싶어서 사진을 2배로 늘려봤고


안됨
걍 이거 사진 정중알을 기준으로 왜곡 계산하는거였다
https://rchelp.capturingreality.com/en-US/appbasics/settings_distortion_models.htm
RealityCapture Help
Distortion Model In RealityCapture you can select a different mathematical model which is used for modelling lens distortion. Even though it might not be directly visible, some distortion always applies. You can define which model you prefer to be used in
rchelp.capturingreality.com
그래서 왜곡 설정 읽어보니


기본값인 Brown3의 경우 180도가 한계라고 한다
나중에 Brown4로 다시 시도해보기로 했다

근데 단안모드가 있길래 단안모드 사용함

Division

Brown3
Division의 인식률은 67.1%
Brown3의 인식률은 50.6%
왜곡보정이 완벽하지 않다보니 결국 가장자리는 버리게 되는 단점이 있다
걍 광각카메라로도 충분할듯
Division이 제일 인식률이 좋았으나 해상도에 비해 가용면적이 줄어 연산량이 너무 높아지는 문제가 있었다
그래서 그냥 보정후 사용하기로 했다
Dewalp보정후 왜곡제거

Division
Brown3
Division의 인식률은 46.5%
Brown3의 인식률은 56.1%
그런데 보정이 너무 많이 들어가서 그런지 왜곡보정이 지나치게 되어있다
그래서 왜곡제거에 초광각보정을 사용하기로 했는데


이렇게 약간 둥글어지는 차이가 있다

Division

Brown3
Division과 Brown3 둘 다 인식률 86.3%로 동일하다
사진을 보면 Division이 왜곡보정이 좀 더 깔끔하게 들어갔다

이경우 보정값
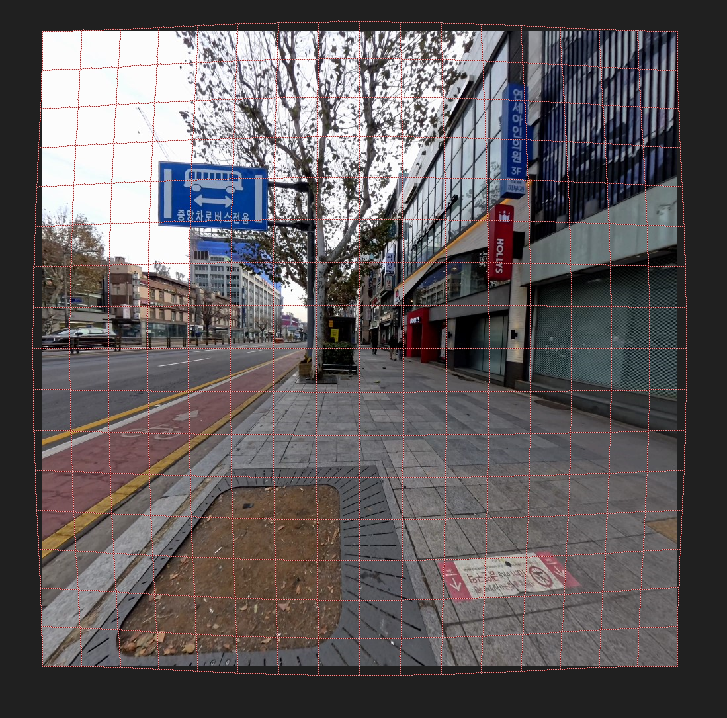
렌더링 결과를 보자
셋다 전부 73장만 사용했다

Original

Dewalp

초광각
결론은 보정 넣는게 오리지널보다 결과가 좋게 나온다


제일 좋게 나온 보정값
# 360 Camera Reaility Capture insta 360 x4
'3D > 3D 스캔' 카테고리의 다른 글
| RealityCapture 1장 - 정렬 Alighment (0) | 2025.01.03 |
|---|---|
| Reality Capture 카메라 데이터 (0) | 2024.12.30 |
| 리얼리티 스캔 사용법 (RealityScan) (0) | 2021.02.23 |